中國科研團隊成功破解多旋翼無人機飛行失控難題分享到:
香港新聞網1月16日電 設想一下,一架四旋翼無人機飛行途中,部分螺旋槳無法旋轉,如何依然保持安全飛行?北京航空航天大學科研團隊歷經多年研究,在多旋翼無人機容錯控制技術方面取得重要突破,為上述難題找到答案。相關成果近日在機器人領域重要國際學術期刊《IEEE機器人學匯刊》發表。
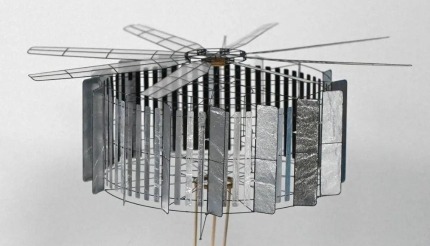
正在飛行的僅一個螺旋槳工作的四旋翼無人機照片。(北京航空航天大學科研團隊供圖) 工業巡檢、消防救援、包裹遞送、拍照攝像……無人機已深入大眾生產生活。常見微小型無人機涉及多旋翼、固定翼、直升機等類型,其中多旋翼無人機是目前應用最廣泛的飛行器之一,其通過多個螺旋槳提供升力,具有垂直起降和懸停能力。然而,無人機快速普及之時,常出現因極端天氣、碰撞障礙物等導致“罷工”墜地的情況,造成人財物損失。如何提升飛行安全性,成為行業緊迫課題。 北航自動化科學與電氣工程學院可靠飛行控制團隊,以四旋翼無人機切入研究,針對飛行器執行機構突發故障後的受力特點,成功設計出被動容災控制算法。團隊通過實驗驗證發現,四旋翼無人機的“控制大腦”搭載該算法後,即便有三個螺旋槳失效,仍可保持安全飛行並實現可控返航。該團隊成員、北航柯晨旭博士說,相關成果可拓展應用於六旋翼、八旋翼等多旋翼無人機。 “如果部分螺旋槳失靈,無人機整體平衡就會被打破,機身會像陀螺一樣自轉起來,螺旋槳出現‘公轉’。藉助這種現象,我們研發的算法能讓正常運轉的螺旋槳‘分身’,提供全部的升力——這好比打乒乓球,如果一個人運動速度足夠快,可實現自己發球、自己跑到對面接球,如此往復,完成一個人的球賽。”北航教授、該團隊成員全權說。 全權表示,未來該成果將應用於新型多旋翼無人機研發,提升多旋翼無人機飛行安全性能。 《IEEE機器人學匯刊》審稿人評價,該研究創新性運用被動容災控制算法,有望為無人機飛行安全方面的科研提供可靠參考。(完) 【編輯:丘志彬】
|
視頻更 多
東江水供港60年 李家超:是國家與香港血濃於水的深情典範
中國發展高層論壇剛結束 這家跨國企業就宣布在香港投資3億
香港七人欖球賽2025 超11萬次觀眾入場 遊客大讚香港是最棒的!
記者帶你走一圈!看首次於香港啟德體育園舉辦的七欖氣氛如何?
"這些技術關乎人民幸福"——中國數字基建出海,給世界帶來了什麼?
《哪吒3》將全部由AI剪輯?哪吒項目執行製片人帶來解答
被問及投資者為何選擇香港 陳茂波這樣回答......
來論更 多評論更 多
論壇更 多 |